Welcome to Ranjit's Page
Robotic Systems Engineer
_Best viewed in Desktop_ santhanaraman.ranjit@rwth-aachen.de
Research Papers
-
Ranjit Roshan, Noufal and Vigneshwar, “Resilience Optimization of Octocopter Drone using two stage thrusters and thrust vector locking” Proceedings of IEEE GCAT 2019 Banglore,India, Oct. 18-20, 2019.
Octocopters use fault handling programs to stabilize and land safely in case of a motor failure. This paper is about ,how the motors can be optimally placed and thrust vectoring can be used, to stabilize and resume normal operation in case of motor failure or propeller breakage. The full paper will soon be published in IEEE Xplore magazine.
Awards
-
Student Project Grant - International Academy RWTH Aachen
Received project grant for development of a drone image based solar panel dust estimation system. This project was a continuation of a previous project involving the development of deep neural network model for the same. Refer here for more info ().
As a part of this project, initially drone image data was collected at 2 solar power generation units in Tamil Nadu (Crescent Institute of Science and Technology and at a 15 MW solar power plant in Thenkasi.
Further processing is to be made to make the dataset ready for re-training the machine learning model.
-
ESE Hackathon - Runner up
Achieved runner up position for the development of a railway level crossing system using Python. The task was to develop code in Python and test it under multiple test conditions.
Data was collected from multiple magentic contact sensors on the track and level crossing gates gates and the algorithm was developed to understand the train’s heading direction and indications were made using LED’s to the train to stop or proceed.
Project Index
Masters in Robotic Systems Engineering
-
Research project - Development of modular sensor fusion platform for environment perception read more
-
Research project - Processing of Dynamic Object Information in MPC Planner read more
Bachelors in Mechanical Engineering
-
Retractable arm induced dynamically stable quadrotors read more
-
Drone development for a national level robotics competition read more
-
H-I-X Quadcopter frame design fabrication and flight read more
-
Python API to automate belt drive design read more
-
Data logging API for Drone test rig read more
-
Micro quadcopter frame design and fabrication read more
-
Robotic Arm design and circuit fabrication read more
-
Bicopter controller circuit design read more
-
Quadcopter control system programming using Arduino read more
-
IMU Visualization using VPython read more
Research project - Development of modular sensor fusion platform for environment perception
Back to Project List Dec 2022
Abstract
In the development of autonomous driving functions, the perception of the environment is one of the elementary and crucial building blocks. This perception part of the driving stack must be modular and decoupled in order to enable easy transmission to other vehicle functions and possibly to other vehicles to enable mutually coordinated navigation. Present environment perception systems are highly vehicle specific and are expensive. For research purposes more generic and cost minimal solutions are needed which should include different types of environment perception sensors such as camera, LIDAR etc. Apart from hardware, flexible software framework is required to run the various
available perception algorithms such as object detection, semantic and instance segmentation. The software framework should be agile and capable of running on the variety of edge computing devices available in real time.
This project work involves the creation of such an optimized hardware and software system for running environment perception on the the edge. Simple, reliable and cost effective camera and LIDAR system will be used to scan the environment. The software framework will be built using C++ and compiled using the CMake build system making the entire framework platform independent and enabling cross compilation possible on different edge computing architectures. Nvidia Xavier platform will be used as the edge computing unit for running the various environment perception algorithms. The environment perception algorithms are pre-trained deep neural network architectures designed for specific tasks such as obstacle detection, traffic signal detection, road lane detection,. etc .
(The image belongs to the research project done at IRT RWTH Aachen)
These networks will be optimized using the TensorRT optimization framework for efficient deployment and real time inference on the edge device.
The end output of the software programming part will be a library which can be included and used to implement various types of environment perception models in an optimized fashion on the edge. Thus this environment perception setup can be attached to any mobile robotic system thereby making safe and autonomous navigation and guidance possible.
Research project - Processing of Dynamic Object Information in MPC Planner
Back to Project List July 2022
Researched on existing methods such as Time to collision, parallex angle, velocity and acceleraiton based methods for obstable information processing in Model Predictive Controller inside an Autonomous vehicle and experimented and compared them for obstacle avoidance by programming the methods as cost functions for the planner.
Worked extensively with the ct C++ control systems library and ROS2 for the implmentation of the cost functions.
Retractable arm induced dynamically stable quadrotors
Back to Project List Feb 2019
Overview:
To implement a drone with variable arm characteristics with the intention to increase the number of available controllable outputs a drones can have.
Drone Development:
As I was studying about the dynamics of drones, I understood that the yaw motion is the consequence of variation in the speed of the diagonal motors but I didn’t understand what exactly induced it.
Gyroscopic approach: My first approach was with the gyroscopic effect. Gyroscopic principles state that “when the axis of a rotating body is tilted along another perpendicular axis, then there is a resultant twist about the axis perpendicular to the plane of the other two axis”. I removed the propellers and with the rotors spinning, I varied the diagonal motors and felt a twist along the yaw axis, but the magnitute seemed too feebile to produced when hovering.
Drag approach: Then I took a long journey across the internet and library to find a solution. I narrowed down to the effect of propeller drag and Eureka! I found it. As the propellers rotate, there is a production of workable thrust only when the thrust line crosses the drag point of a thrust-drag-rpm plot. This drag like the back-emf is present all the time and as the propeller spins, there is a production of torque about the center of rotation with respect to the center of the drone.
Assume that the propeller is spinning in an arm of the drone and the propeller at this instantaneous point of time is aligned with the drone arm (paraller to it). The drag exists on both the prop sections (here we are assuming a two bladed propeller) and since one section is present at a longer distance from the center of the drone the torque is more (Torque = force x perpendicular distance). When the motor spin clockwise the drag is counter-clockwise and this causes the drone to yaw CCW (counterclockwise) when the CW motors are spun faster.
Drone development for a national level robotics competition
Back to Project List June 2019
Overview:
The challenge was to design a frame based on given constraints such as max gross weight of 2 kg and max possible dimensions as 75x75x75 cm.
Drone Development:
- We planned to design the frame using aluminium with some weight reduction plans.
- Every component of the drone was modelled, assembled and the flight was animated in blender to get a visualization of our end goal.
- We created a retractable landing gear system completely by ourselves from scratch and wrote a ground station program to control the retracting action from it.
- We chose NRF for communication between the base station and the drone, but due to high signal interference (SNR) we had to switch to static legs to reduce uncertainity.
- The APM 2.8 provided the primary flight control system, while we coded an auxillary control system for retractable landing gears and battery monitoring.
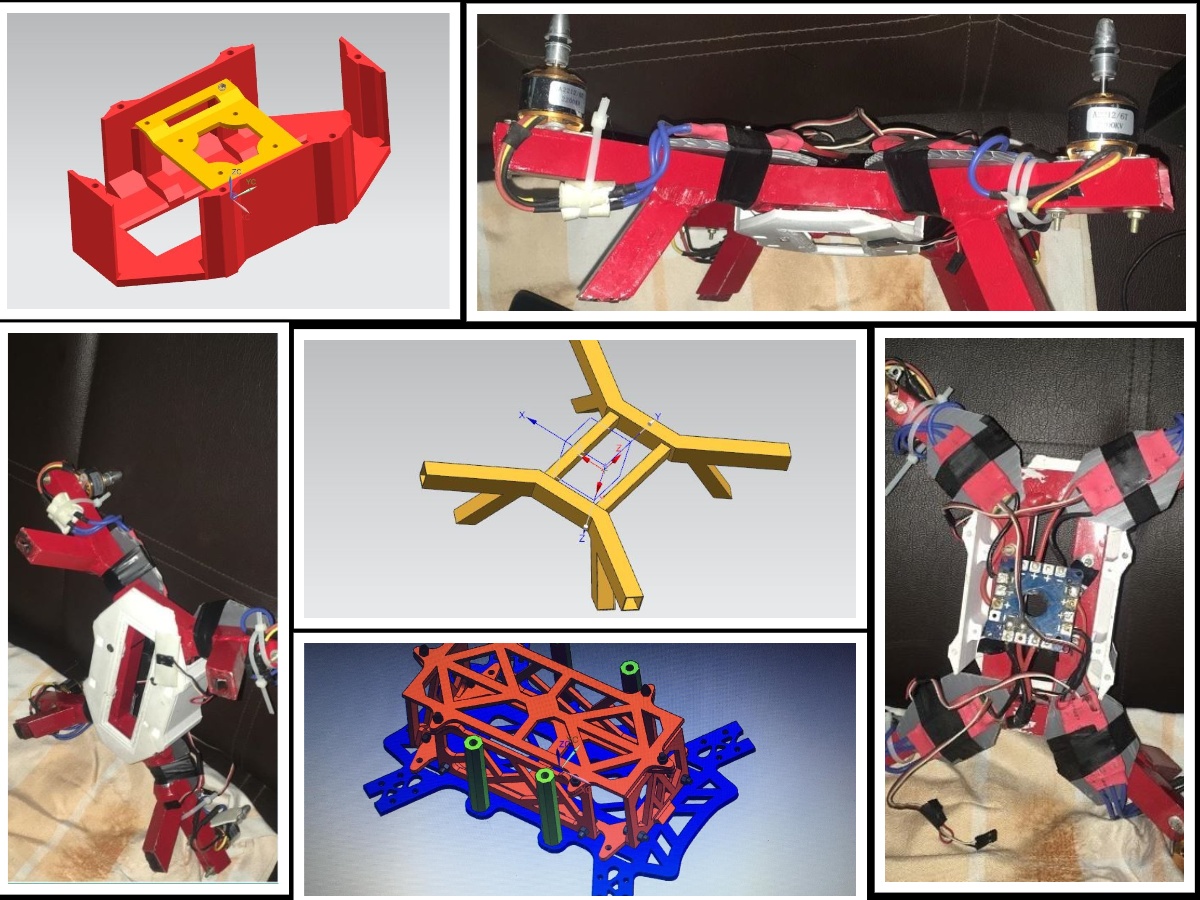
H-I-X Quadcopter frame design fabrication and flight
Back to Project List Dec 2017
Overview:
The common basic geometries of quadcopter frames are H, I and X type each with its own advantage during flight. This project is to design a frame by combining all the geometries.
Features:
- The outer arms are angled with respect to the pitch and roll axis, while a beam like structure holds them together.
- The aluminum frame is welded together with the legs at a angle to the yaw axis.
- This is a research experiment to understand the moment of inertia and how trade-off’s are made to attain stable flight and structural integrity.
- The outer cover is 3D printed using ABS plastic.
- APM 2.8 is used to control the drone.
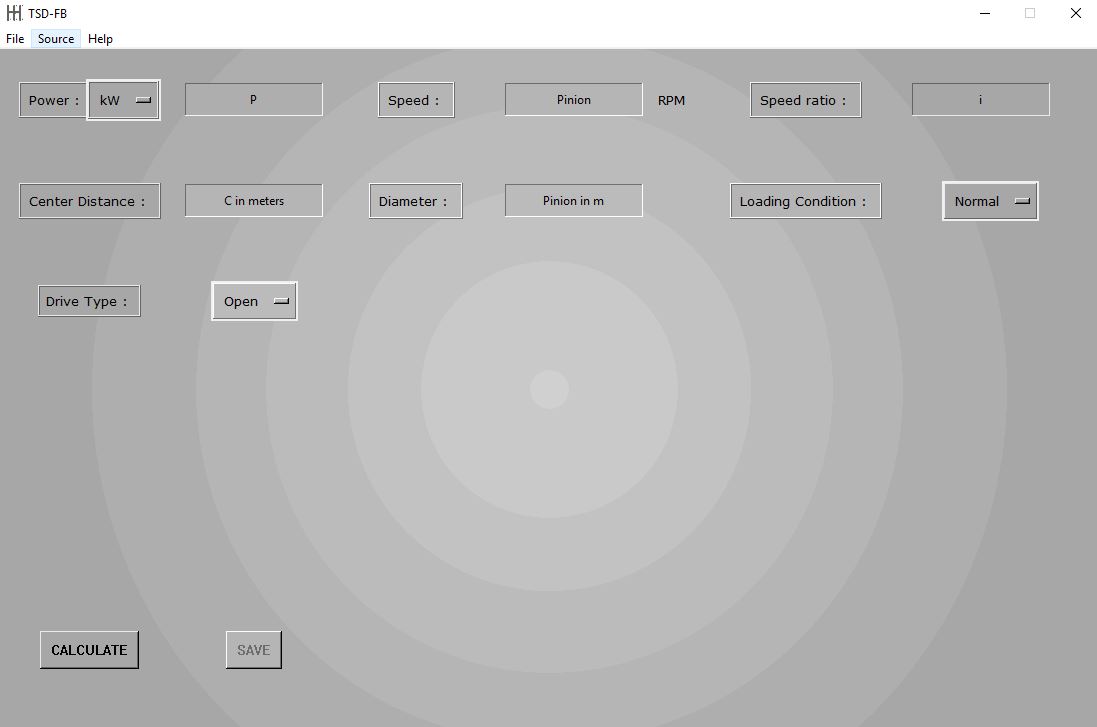
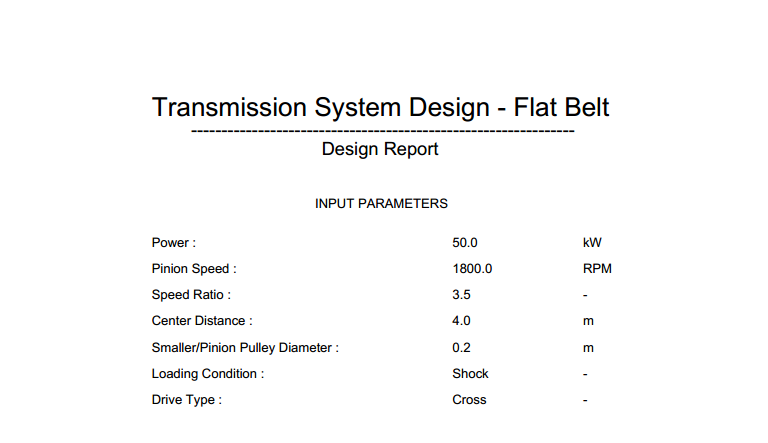
Python API to automate belt drive design
Back to Project List Nov 2018
Overview :
This Project involves, the creation of an application to automate the design process of a flat-belt drive system.
Manual Process Disadvantages:
The manual design calculation is a tiresome process, involving many substitutions in pre-derived formulae. In case of design failure during stress testing, the design process has to be repeated again from the beginning. This is not only a tiresome process but also an inefficient one.
The Automated Process
- Thus with the advancement of faster computing and better user interfaces an application can be programmed or created to automate the above explained process.
- These programs can produce results with viable inputs in milli-seconds.
- Design failure can be treated with absolute simplicity i.e. just by altering the input values and the rest of the process is executed once again automatically with a click.
View repository on Github
Python API Screen:
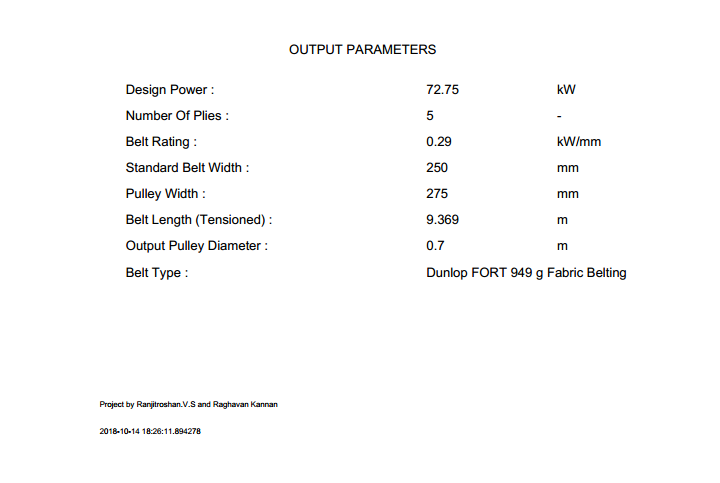
 Output in PDF Format:
Output in PDF Format:
Data logging API for Drone test rig
Back to Project List Feb 2019
Overview
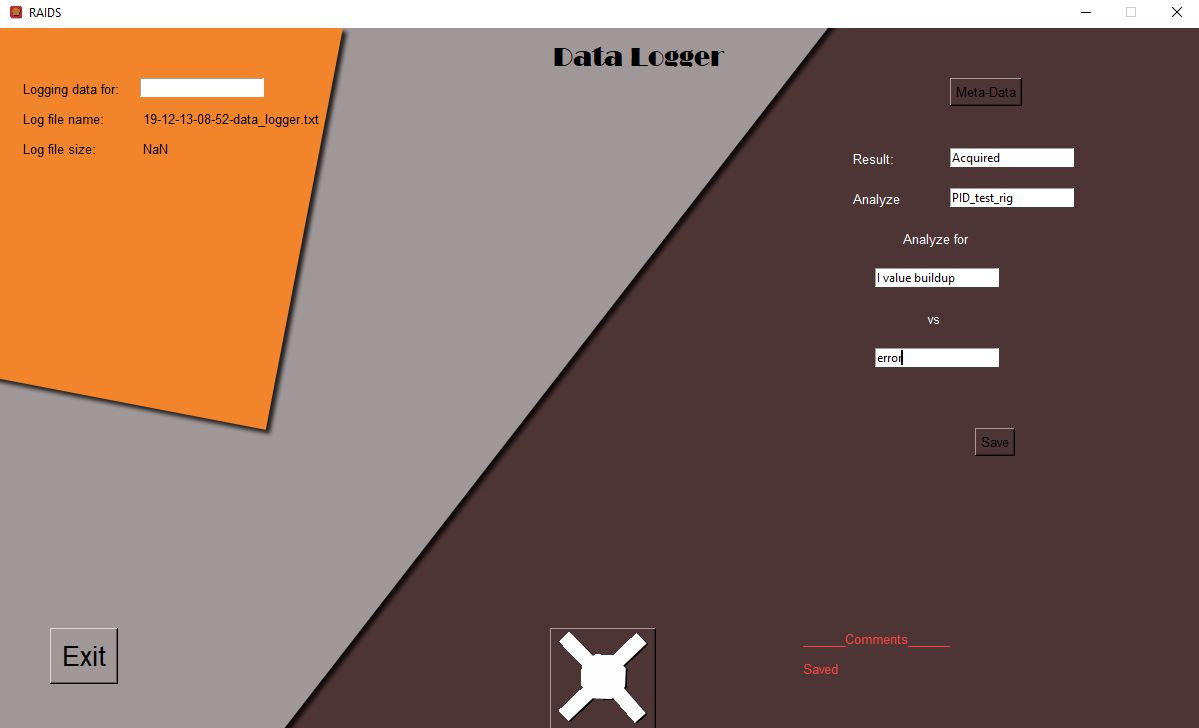
In order to understand and tune the drone features like battery life, PID values, throttle curve etc there is the need for data logging. This API provides the tool to record data and is based on Pyserial and Arduino library.
Features
- The program is portable to any place just using some arduino pins and a USB-COM Port.
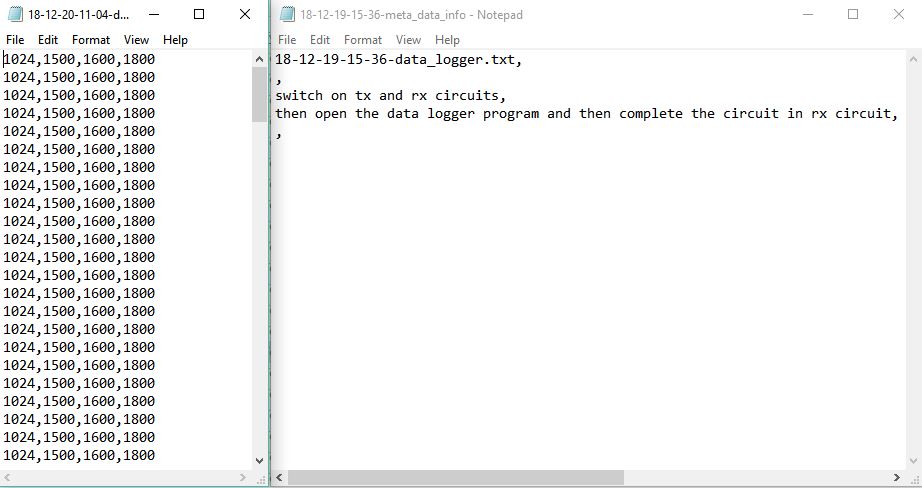
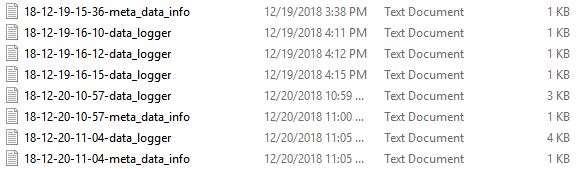
- The program saves the data in a time-stamped file with a meta-file which stores additional user data during the initial and final stages of recording.
- The data is stored in plain text documents as comma seperated files(.csv), which can used in data analysis tools like pandas and excel.
View repository on Github
API Interface:
 Data and Meta files:
Data and Meta files:
Micro quadcopter frame design and fabrication
Back to Project List Nov 2017
Overview:
A microquad is a frame which is in the category of 250g and below. This project is aimed at designing a 3D printable frame
Process:
The frame is modelled considering that the thrust is provided by 8mm coreless motor and 60mm propellers. A IRF540 voltage controlled current mosfet is used to vary the speed of the motors.
Robotic Arm design and circuit fabrication
Back to Project List April 2018
Overview:
Robotic arm are of various types and this is an articualated type which mimic’s a human arm.
The Design Process:
- I went to a workshop on 3D printing and found a service provider near me.
- For the kinematics of machinery project, I modelled the robotic arm and 3D printed it.
- The circuit was designed using EasyEDA and JLCPCB provides a very low rate on circuit fabrication (2$ for 10 PCB’s).
- I tried their service and got the board within a week time. I solered the components and tested the circuit.
- The design was not good and had a lot of assembly issues since I didn’t account for various 3D printing parameters. I thought not to post this project, but convinced myself that my failures will surely help someone else to design a successful project.
Tips:
* Account for 3D printing parameters like wall thickness and warping especially for ABS materials. Design curves considering the extruder diameter to get better shape accuracy and think about the axis of printing for better strength.
* During any mechanical design, especially cases where movements are default, consider dynamic forces on the body.
* Test the actuators with loads prior to designing to get better focus on what is achievable in reality.
Bicopter controller circuit design
Back to Project List Nov 2019
The Bicopter:
The bicopter is a drone with four actuators and unlike a quadcopter the lifting thrust is provided by two and the other two actuators do
the work of tilting the thruster axis to control roll and yaw motion.
The Problem
Since aluminium is the primiary material we work with, due to material availability, machining and cost effectiveness the circuits often tend to shortcircuit when testing and during crashes. In order to do quick testing one cannot keep insulating and removing the insulation all the time to change and tune PID values.
The Solution:
Hence I designed this circuit with an external relay circuit which once activated by a switch is powered by the controller itself. This can be used as a worst case kill switch but that’s the most worst case.
Quadcopter control system programming using Arduino
Back to Project List Dec 2019
Overview:
Implementation of a PID controller using an Arduino to control a quadcopter.
Process:
- In order to establish a closed loop controller a sensor which can detect the system changes is required.
- The MPU6050 6 axis Gyro and accelerometer sensor provides the data to stabilize the system.
- The data is collected through the I2C bus and then using filters and sensor fusion the drone inclination angle is found out.
- This angle is compared to the Transmitter stick inputs and the residual error is compensated using the PID controller.
( I will post a detailed note on every step as soon as I complete the project)
EXTRAS
IMU Visualization using VPython
Back to Project List Dec 2019
Github
Overview
Real time visualization of a IMU using VPython and Arduino
Implementation
- In order to make sense of the data from a sensor we need a visual aid. VPython provides the tool the create models and make rotations.
- The raw data is obtained from the sensor and is processed using complimentary filters to obtain angular rates and angles.
- The data is sent via a serial bus and the sensor model is rotated according to the sensor readings in real time. (The visualization is under constuction and below is a sample of the tool)